给汽车碰撞安全写差评的人不存在,因为遇到碰撞安全性能特别差的车他没机会写。但对于汽车NVH性能,却是人人都可以写差评,因为每个人都…
以“融合·创新·绿色”为主题的2021中国汽车产业发展(泰达)国际论坛于9月3-5日在天津召开。广汽集团执行委员会成员兼自主品牌经营管理委员会副主任、广汽研究院院长吴坚出席了9月5日会议,并发表了题为《高级智能驾驶辅助应用与思考》的演讲。
吴坚表示,汽车智能化发展在经历了机械车、电控车两个时代后,进入了智能车时代。在智能车时代,汽车会经历高级智能驾驶辅助并不断向无人驾驶演化。面对汽车智能化的挑战,广汽将稳扎稳打,一如既往地坚持传统安全的管理与实践方向,稳步迈向汽车高级智能化发展道路。
以下为主旨报告:
各位来宾,很高兴在这里跟大家分享广汽在高级智能驾驶辅助方面的应用和思考。

吴坚发表了题为《高级智能驾驶辅助应用与思考》的演讲
广汽高级智能驾驶辅助的目标
汽车智能化发展一直在进行,广汽将智能驾驶分为三条赛道:驾驶辅助赛道、高级智能驾驶辅助赛道、无人驾驶赛道,不同赛道部署了不同的开发策略。
驾驶辅助赛道是L2及以下的简单驾驶辅助,广汽已率先量产驾驶辅助产品并逐步推广;无人驾驶赛道是L4及以上的全自动驾驶,广汽重在前瞻预研和技术攻关,等待市场的到来;高级智能驾驶辅助赛道介于驾驶辅助和无人驾驶之间,广汽根据成本和实施路径部署了高算力平台和中算力平台,逐步实现向无人驾驶过渡。今天,我们主要探讨高级智能驾驶辅助。
广汽高级智能驾驶辅助的目标是打造支持点到点的全程辅助驾驶,包括高速公路、城区和停车场场景,功能上支持单车道巡航、自动变道、自动上下匝道、路口直行左转右转调头、环岛和收费站通行等,同时不断升级主动安全功能,包括更多场景、更精准的制动辅助、转向辅助、安全提醒等,为用户提供安全保障。
迈向高级智能驾驶辅助的挑战
在实现高级智能驾驶辅助的过程中,我们面临了很多挑战。
智能化进阶挑战
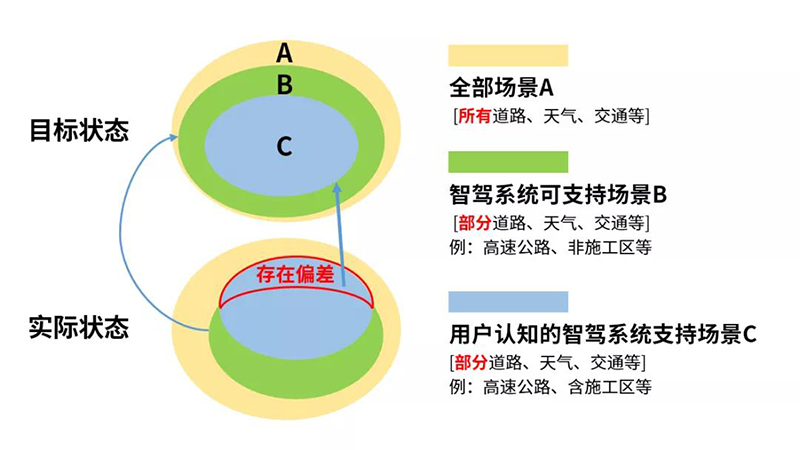
如图所示,橙色区域是车辆行驶的全部场景A,绿色是智驾系统可支持的场景B,蓝色是用户认知的智驾系统支持场景C。
我们面临的第一个挑战是汽车智能化要不断升级。智驾系统可安全工作场景需要不断趋近于车辆行驶的全部场景。
第二个挑战是用户认知要重新塑造。用户要清晰地认识到智驾系统可支持的场景边界,只有用户认知的智驾系统支持场景C≤实际状态的智驾系统可支持的场景B,用户判断边界后可提前接管并实现与智驾系统良好配合,才能保持智驾系统使用的安全状态。
第三个挑战是用户状态也是系统重要关注点。随着智驾技术的提升,智驾系统可支持的场景不断增加,需要用户接管的场景不断减少,但同时用户出现分神或疲劳的概率也在增加,如果遇到需要用户接管的场景而用户无法及时接管,势必存在危险。
因此,我们认为保持智驾系统使用的安全状态以及保持用户随时接管能力,是智能化进阶的挑战。

吴坚出席泰达国际论坛
高级智能驾驶辅助的应用与思考
面对挑战,广汽从两大方面开展工作,一个是智驾系统需要更智能、更安全,这是车企要做的;另一个是用户与智驾系统需要配合实现驾驶任务,这是用户和车企要共同培育的。具体而言,包括系统感知能力范围要进一步提升、系统可支持场景要不断迭代升级、系统安全设计要保障各工况下稳定运行、人机共驾交互要更加智能化。
系统感知能力范围的提升
高级智能驾驶辅助要更智能,首先对单车本身的系统感知能力提出了更高要求。
在系统方案上,广汽会导入高像素摄像头、高分辨率固态激光雷达与大算力芯片,进而提升系统感知能力,提高系统安全性。
目前,大多数车企采用200万像素摄像头,探测距离大约200米,广汽希望做到800万像素摄像头,提升目标探测距离尤其是中小物体探测能力,以提高安全性和舒适性。同时,由于摄像头视觉无法识别未训练目标,且受光线、天气等影响较大,而毫米波雷达对于静止目标及目标方位的探测能力较差,因此广汽会导入高分辨率固态激光雷达,以提升上述场景的探测能力和系统安全性。
除了单车本身系统感知能力的要求,车路协同与单车智能的融合,也是有效的解决方案。
目前,行业内大部分方案是单车智能,该方案存在复杂场景感知不准确、感知距离受限、视觉盲区、其他车辆行为难以预测等问题。因此,引入车路协同十分必要。高级智能驾驶辅助应用车路协同可弥补单车智能的固有缺陷,大幅扩充高级智能驾驶辅助的支持边界,同时为用户提供更全面的信息。
因为车路协同主要取决于路侧基础设施的覆盖率、产品的成熟度等,所以,我们预测未来几年仍是以车端为主、以路端为辅的阶段。我们希望全行业共同努力,致力于路侧设备部署、互联互通、边缘计算、协同感知、协同决策、群体智能、应用场景探索等关键技术研究。


广汽推出全球首个5G V-BOX产品,可支撑车路协同
系统支持场景可迭代升级
在系统感知能力提升后,在场景扩展上需要智能驾驶仿真体系的支撑。
一方面,要建立和完善智能驾驶仿真测试系统,涵盖MIL、SIL、HIL、VIL等环节。另一方面,要通过本地与云端结合的方式,逐步建立基于云端的全自动仿真测试体系,形成开发、测试、量产的闭环迭代。
配合智能驾驶仿真体系的建立,更重要的是智驾数据中心和场景库的搭建。
智驾数据中心是汽车智能化演进生长的“粮仓”。人通过吃食物成长,智驾系统通过“喂数据”成长。依托智驾数据中心,逐步丰富场景库,特别是极端场景,可形成智驾功能、产品的闭环迭代升级,逐步扩展智驾系统支持的边界。
因此,我们需要通过“场景库+算法训练”,对故障场景、危险场景、事故场景等车辆运行的真实数据,进行分类、筛选、标注等,构建多元化场景库,持续开展人工智能算法训练;最终,通过数据训练、OTA、量产导入,形成数据闭环,实现智能化迭代升级。
完善的整车OTA体系也是高级智能驾驶辅助不断提升智能化的重要手段。
但我们要以谨慎的态度对待OTA,每一次OTA必须做到以下几个方面:第一,升级的软件必须做到充分、完善和严格的验证。第二,按照工信部正在推出的OTA法规和标准,完成报备和审批。第三,OTA过程必须做好充分的安全防护,确保这些软件的安全性和升级的可靠性。第四,OTA前必须做好充分的用户提示,让用户充分理解OTA升级前后的变化。
安全流程与系统设计
在系统感知能力和开发迭代能力提升以应对高级智能驾驶辅助挑战的同时,我们希望建立高级智能驾驶辅助系统全方位的安全设计理念,包括系统安全设计、控制策略设计、安全开发流程管理等。
在系统安全设计方面,为了提升高级智能驾驶辅助系统的安全性,系统需要支持降级运行,因此需要按照冗余需求进行系统设计,感知系统要实现车辆360°区域覆盖,同时至少要有两种传感器的探测覆盖。
在控制策略设计方面,决策控制、执行控制、供电系统、网络通信和HMI均需进行冗余设计以满足降级运行。并不是说只有L3、L4级别的智能驾驶才需要冗余设计,高级智能驾驶辅助同样需要。
在安全开发流程管理方面,将功能安全与预期功能安全全面融入传统“V字型”产品开发流程,融入开发者的开发理念当中,才能确保从企业和产品层面都能形成稳固的安全保障。
全新人机共驾交互
高级智能驾驶辅助与传统的机械车相比,在智能化方面有较大的跨越。更高级别的智能化系统,需要更安全的人机交互设计。
过去,汽车仅把最简单的信息和状态传递给用户。但在高级智能驾驶辅助阶段,信息维度实现了跃升,环境信息、其他交通参与者信息都可以展现给用户。同时,智驾系统的“想法”也要传递给用户,这是信息维度的跃升。人机交互信息种类丰富、交互维度提升,是高级智能驾驶辅助全新的特点。
当人机共驾时,用户容易在长时间使用高级智能驾驶辅助后陷入人机共驾和人为驾驶状态的模糊意识中。因此,我们要确保用户在执行驾驶任务时,对状态边界有清晰的认识。
全新人机共驾下,对用户的培训至关重要。从理解层和执行层两个层面入手,就像考驾照一样,对用户进行包括学习教程、笔试、路试等维度在内的培训,加强用户对智能驾驶功能的理解和使用场景的应对能力。通过人机交互系统,测试用户对智能驾驶功能的把控能力,从而开放不同的功能和使用场景,是我们行业后续要共同努力的方向。
即使对用户有全面的培训,系统仍需要对用户的驾驶状态进行判断。目前,系统对用户疲劳、分神、危险驾驶行为的判断能力在快速提升,准确率也在不断提高。未来,系统仍需要通过视、听、触、嗅等多感官提醒方式,确保用户对车辆控制能力具备及时性和有效性。
稳步迈向高级智能化
综上,为了保障高级智能驾驶辅助快速平稳发展,我们要在技术支撑体系和系统方案设计上实现多维度的支撑体系框架,稳扎稳打,一如既往地坚持传统安全的管理与实践方向,稳步迈向汽车高级智能化发展道路。

吴坚在泰达国际论坛发表主题演讲
最后是我们对行业整体智能化快速平稳发展的思考和建议。在安全标准方面,考虑第三方机构加入法规、标准的编制和开发,加快安全法规、标准的落地,以及执行的监测,完善行业安全体系制度。在场景方面,加速场景格式、接口格式的统一化规则,加快场景积累与共享,推动加速行业智能化迭代速度。在芯片方面,除了芯片研发、生产以外,加快推动国产芯片应用的指令集、编译器、开发工具等芯片工具链生态发展,让高级智能驾驶辅助更高效、稳健地发展。
以上是广汽在高级智能驾驶辅助方面的应用和思考,供大家参考,如果有说得不对的地方请大家批评指正,谢谢大家!